虹科答疑 | 3步搞定CAN CC/FD双向转换!虹科PCAN-Router FD实操教程来了

CAN协议的「新老并存」是很多工程师都会遇到的现实难题:我们常用的经典CAN(CAN CC,即CAN 2.0),作为成熟稳定的协议,单帧报文通信比特率最高可达1Mbit/s,汽车电子领域进行ECU之间的通信常采用500kbit/s的速率,其单帧报文payload最大支持8字节,还能兼容远程帧、扩展帧等多种数据段、仲裁段的变种形式,广泛应用于各类测试台架、旧设备系统中。
而作为第二代CAN协议的CAN FD,在性能上实现了大幅升级:采用CAN FD SIC收发器时,通信比特率最高可支持8Mbit/s,整车场景中一般采用500kbit/s-2Mbit/s,部分ADAS场景更是能达到500kbit/s-5Mbit/s;单帧报文payload最大支持 64 字节,能满足新一代ECU对大量数据传输的需求。
但关键问题在于,两者的兼容性存在「单向壁垒」:CAN FD节点可以兼容CAN FD和CAN CC的报文,但CAN CC节点完全无法识别CAN FD报文,一旦直接连接,必然导致总线错误。
在实际应用中,这种兼容性问题频繁困扰着工程师:手里的测试台架、系统或工具只支持CAN CC,而新采购的ECU却只支持CAN FD。如果贸然升级全套设备,不仅要投入大量资金,还需要花费时间重新调试适配,人力成本也会大幅增加;可如果放弃新ECU,又会直接影响项目开发进度...
其实,只要一个可编程网关,就能轻松打通两种协议的通信壁垒 —— 今天就带大家详细拆解,如何用虹科PCAN-Router FD实现CAN CC与CAN FD的双向转换。
01 .
转换的核心原理是什么?
要实现双向转换,本质是解决「协议差异适配」和「数据承载兼容」两个问题。我们先通过简化的报文结构,看清核心差异:
CAN CC报文结构体
struct{ Message_ID; // 11/29 bit identifier Message_TYPE; // RTR/STANDARD/EXTENDED... Message_LEN; // DLC = 0...8 Message_DATA[8]; // Payload:DATA[0]...DATA[7]}CANCC_Msg;
CAN FD报文结构体
struct{ Message_ID; // 11/29 bit identifier Message_TYPE; // RTR/STANDARD/EXTENDED/FDF/BRS... Message_LEN; // DLC = 0...15 Message_DATA[64]; // Payload:DATA[0]...DATA[63]}CANFD_Msg;
转换的关键的是比特率匹配和报文映射。核心报文的类型和数据长度这两个字段的匹配问题,而报文ID可以直接复用。核心分两种场景处理:
当数据长度DLC ≤ 8时:直接映射
此时CAN FD报文的数据量的能被CAN CC单帧承载,只需修改报文类型(如将CAN FD的FDF/BRS标识转为CAN CC的STANDARD/EXTENDED类型),就能直接双向转发,操作最简单。
当数据长度DLC>8时:定制化处理
CAN FD的64字节最大数据量,远超过CAN CC单帧8字节的承载上限,这时候需要二选一:
舍弃冗余:直接挑选核心数据(≤8字节),多余部分丢弃,高效快捷;
拆分/合并:用多帧CAN CC报文承载一帧CAN FD数据(比如64字节需8帧CAN CC报文),可选择「不同ID分帧」或「同一ID连续多帧」(类似ISO-15765多帧逻辑),灵活适配实际需求。
02 .
3步搞定核心配置
明确上述转换逻辑后,可以通过虹科PCAN-Router FD网关来直接操作。
虹科PCAN-Router FD网关
虹科PCAN-Router FD作为可编程网关,支持通过代码自定义转换逻辑—— 无论是直接映射、数据舍弃,还是复杂的拆分合并,都能精准实现。下面是具体操作步骤,新手也能跟着做:
第一步:备好工具包
先下载核心开发资源,后续配置、编程都要用到:
固件开发包:PCANDevPack
https://www.intelnect.com/hongke-quick-start-center/installation-package-download-center/
开发教程
https://www.intelnect.com/hongke-quick-start-center/development-resources/
参考例程路径
DevPack\PEAK-DevPack\Hardware\(对应设备型号)\Examples
第二步:修改总线比特率
首先要让CAN CC和CAN FD总线的比特率匹配,避免通信异常:打开开发包中的can_user.c文件,找到比特率配置代码,编辑对应通道的比特率。
can_user.c(部分)
// timings fo CAN1 and CAN2staticconstCANTiming_t Timing_CANx[2] = {_80M_500K_80___2M_80_ISO, //CAN1_80M_500K_80___2M_80_ISO //CAN2};
若需要自定义比特率(比如ADAS场景的5Mbit/s),可在can_user.h文件中编辑或新增配置。
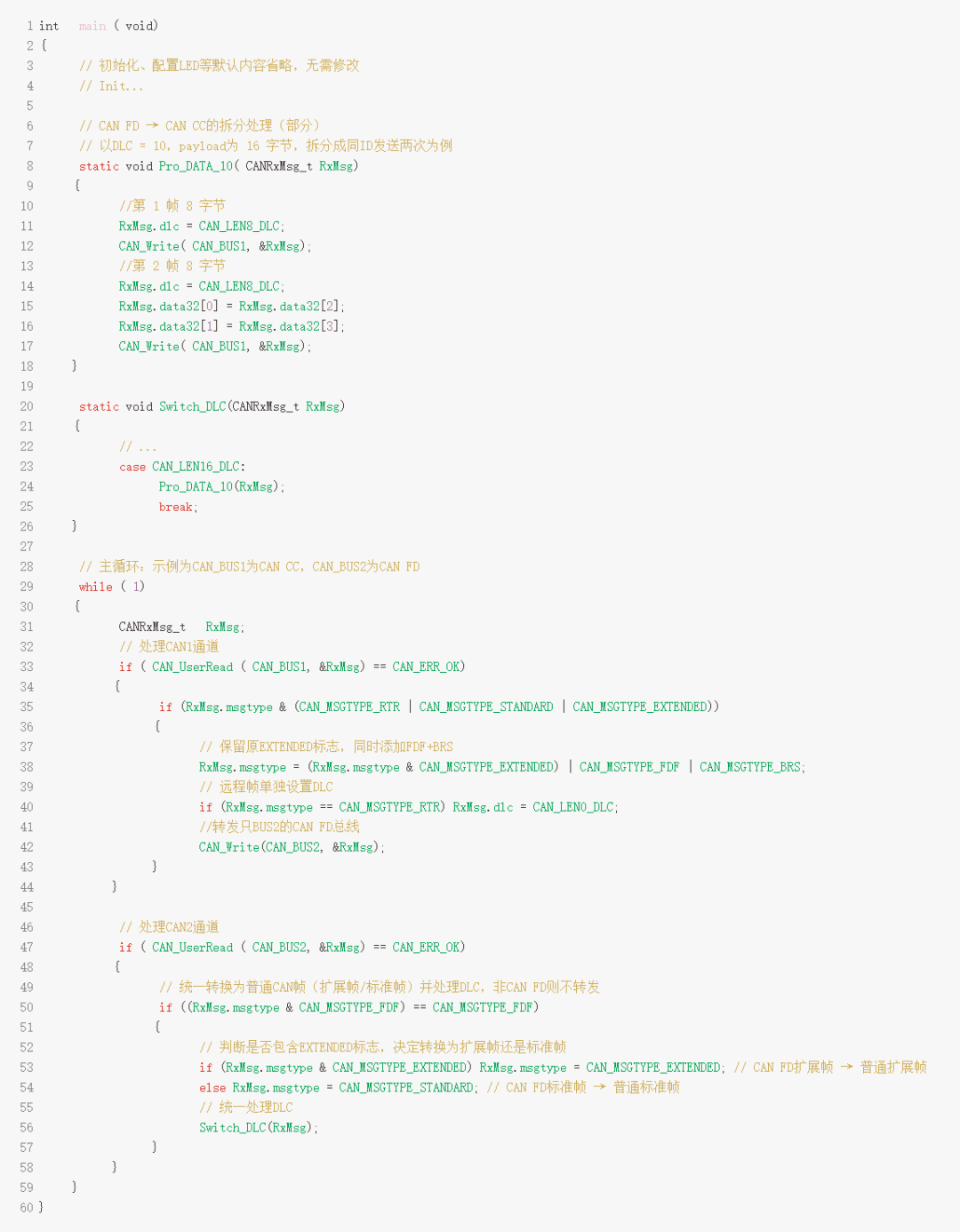
第三步:编写转换逻辑
打开main.c文件,核心围绕「读报文 → 处理报文 → 转发报文」的逻辑修改,以下是关键代码示例:
03 .
转换稳定吗?看实测数据
我们搭建了测试环境:BUS1(CAN CC)比特率 500kbit/s,BUS2(CAN FD)仲裁段比特率500kbit/s、数据段比特率2Mbit/s,实测两种方向的转换均稳定可靠:
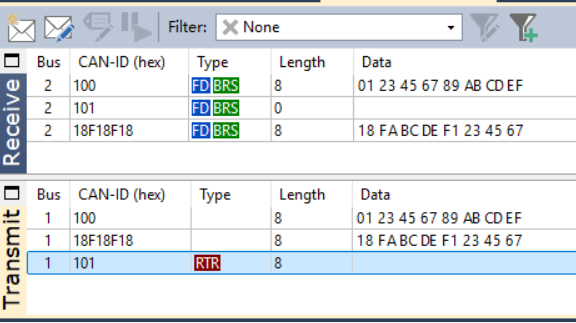
CAN CC → CAN FD
CAN CC的标准帧、扩展帧、远程帧,均能成功转换为带FDF/BRS标识的CAN FD报文,数据无丢失,延迟控制在毫秒级。
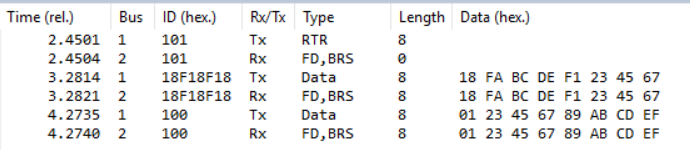
CAN FD → CAN CC
16字节的CAN FD报文,成功拆分为两帧8字节CAN CC报文,数据完整拼接无错乱。

本期小结 .
相比普通网关,虹科PCAN-Router FD的核心优势在于「可编程性」—— 无需受固定转换规则限制,无论是简单的直接映射,还是复杂的多帧拆分/合并,都能通过代码定制,完美适配测试台架、新旧设备兼容、ADAS场景等不同需求。
整个使用逻辑非常清晰:按照「比特率修改 → 读报文 → 处理报文 → 转发报文」,即可实现双向转发。对于汽车电子工程师来说,既不用额外投入成本升级设备,又能快速解决协议兼容难题,效率拉满。
虹科技术赋能
虹科提供CAN(FD)、LIN、汽车以太网及TSN等主流通讯协议的全方位技术服务与定制化培训课程。培训秉承「小班教学 + 理论结合实操」核心特色,特邀国内外行业技术领头人、项目经验丰富的资深工程师授课,且与国外行业协会深度合作;每年在全国多地开设公开班,更支持按需定制上门服务。



